Maintenant en voyant cette commande je me dis ok ! elle est faite pour que inmoov fasse un Happy ! voilà ce que j’ai compris !
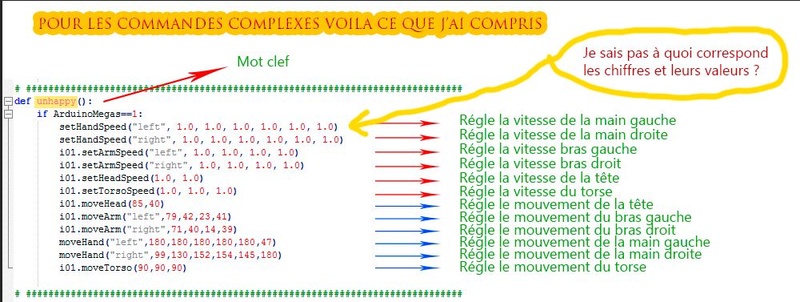
ce qui me reste à comprendre !!! les valeurs des chiffre en speed = vitesse la je voie 1.0 pour la main !! mais jusqu’où cette valeur existe en mini et maximum 6.0 ? 8.0 ? est-ce que 1.0 est une vitesse rapide ? moyenne / lente ? si je rentre 0.7 ou 0.3 est-ce encore plus lent que 1.0 ?
ici sur la main y’a 6 valeurs (je suppose que cela correspond au 5 doigts + le poignet ? ) mais si c’est ça ou se trouve le poignet au début ou à la fin ? le pouce suit t’il le même ordre que notre propre main droite ou gauche ?
pour les mouvements je voie d’autres valeurs par exemple ici :
i01.moveArm(« left »,30,72,77,10) = donc là je suis sur le mouvement du Arm = Bras gauche, mais 30,72,77,10 ce sont des valeurs de positionnement servo non ? comment on trouve les juste valeurs ? y’a t’il un tableau des valeurs ?
ensuite je voie que beaucoup de commande commence par i01 sauf moveHand(« left »,180,130,4,0,0,180) pourquoi ?
Merci de vos précieux avis 🙂
ps: si il existe pas de tableau de référence des valeurs sa serait peut-être une idée d’en faire un ? non ?