- Plus some small screws for the eye mechanism, the jaw machanism and to fix the pistons on the small servos. But I used the screws that were delivered with the servos.
Hands and forarms(Left, right):
- 10x servos HK15298B=180 euros Hobbyking
- 2x servos MG996r=22 euros ebay for the rotational wrist
- 0,8mm braided /fishing line. 200LB= 10 euros ebay
- Miscealenous Bolts= 10 euros hardware store
- 1500gr natural ABS= 70 euros orbi-tech get 4kg if you start printing
- 10x extension spring 0.51mm diameter, 1cm length(13/64″x13/16″)
Arms and shoulders(Left, right):
- 8 Hitec HS805BB=240 euros ebay (better get even stronger in torque and faster)
- Miscealenous Bolts= 10 euros hardware store
- 1500gr black, yellow, natural ABS= 56 euros orbi-tech
Head and torso:

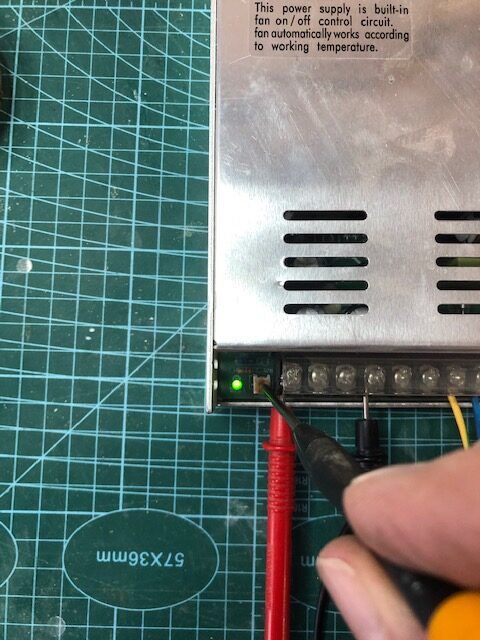
 If you cannot find a 6V50Amps on the internet, you can get a 5V50Amps power supply with a adjustable switch to increase the voltage to 6V for your servo motors.
If you cannot find a 6V50Amps on the internet, you can get a 5V50Amps power supply with a adjustable switch to increase the voltage to 6V for your servo motors.
In the exemple below I am adjusting my 5V to a voltage of 7.5V.
 Stomach:
Stomach:
- High stomach: 2x Hitec HS805BB
- Mid stomach: 2x Hitec HS805BB or HK15338
Ribbon cable length:
- Nervo board to neck——————————— ribbon length 10cm
- Nervo board to head (Eyes/Jaw)—————- ribbon length 55cm
- Nervo board to Arm————————————– ribbon length 75cm
- Nervo board to hand————————————- ribbon length 90cm
- Nervo board to fingersensors————————- ribbon length 120cm
- Nervo board to stomach————————— ribbon length 30cm
Latest Configuration with NUC:
- CPU: 8th Gen Intel i7 8550 Quad Core 4,0ghz
- SSD: 256GB (OS + Myrobotlab)
- HDD:500GB ( just because I had a spare hard drive)
- RAM: 32GB
- Graphic: Intel UHD Graphics 620
- Connectivity: HDMI, Mini-DP, Gigabit Lan, 2*USB3.0, 2*USB2.0,
- WIFI & Bluetooth: 2.4G/5G Wifi B/G/N/AC+bluetooth
- Size: 113mmx108mmx30mm
- OS installed: Windows 10 pro and Linux Ubuntu
- Tablet Lenovo connected as screen via hotspot to control wirelessly the PC (Tablet model Thinkpad8 2GB RAM, 128GB ssd, Processor 1,46Ghz)
Connected devices controled by MRL:
- 1x USB3.0 Hub 8 ports
- 1x OAK D-Lite (fixed focus) not yet fully supported in MRL
- 2x Arduino Mega
- 2x Nervo Boards
- 1x Arduino Nano
- 3x NeoPixel
- 2x HC-SRC04 sensors
- 1x PIR sensor
- 10x finger pressure sensors
- 2x Hercules webcam
- 1x USB sound card
- 1x Logitech H600 headset wireless
- 2x loud speaker 10watt
- 1x power supply 6V 60Amps which can be replaced by a 6V12AH battery pack
Older configuration:
Using a Lenovo Touchpad 8″ tablet with a 8port Hub powered by a Powerbank 10000mAh 5V. The Tablet runs either under Windows8 or 10, and can be configured to run with Linux. It is a true mini PC. You will need a OTG+Charging special cable for this Lenovo Tablet. I had a hard time to find it, which is very strange. Carefull other similar Tablet brands cable will not work.
I was expecting to be able to use the case for travelling but unfortunately there is a serious issue with the size. Although the seller pretends to sale cases that fit 8″ tablet it is truly impossible to fit the tablet.
So you are advised about the issue…
Beside that the keyboard works fine, with sometimes a loss of connection but it automatically reconnects anyway.
The PowerBank+8 port HUB USB3.0 powers through USB:
- the tablet Lenovo
- the Arduinos
- the cameras
- the sound amplifier
- Kinect
I purchased a 8 port HUB USB3.0 to have extra ports and it works fine with the OTG cable and the Lenovo Tablet. If you do not use the powerbank, it’s important for to power the hub to have a supply that can deliver at least 5v4Amps, because we hook many USB devices that require each 500mAh.
Substitute possible tablets but not tested:
- Venue 8 Pro 5000 (5855) (Should fit according to the specs size, the OTG cable(Charge+Data transfer) is not possible to find according to some users)
- Jumper EZpad Mini3 Windows 10 8.0 inch 2GB/32GB (no need for otg+charge because of seperate charge and USB3.0) Should fit in the back of the robot.
- Insignia™ – 8″ – Tablet – 32GB (Some builders reported this tablet to be junk)
- KOCASO 8 Inch Windows 10 HD Tablet PC Computer (Too small, will need a printed adapter)
- Chuwi Hi8 Pro 8″IPS Windows10 (Should fit according to the specs size)
- NUVISION, Full HD 1920X1200 IPS Signature Edition tablet. 8″(Too small, will need a printed adapter)
Kinect 360 battery powered with 10 AA rechargeable batteries of 1,2v 2500mAh.

#############################################################################
After many tests with the OdroidU3 and the Raspi2, I came to the conclusion that the Arm processor were too slow to obtain a correct FPS value from the cameras, which lead me to go for another option.
This is abandoned:
############################################################################
Servos in order of my preferences for the hand:
- JX PDI-6221MG(20-36kg torque,never burned, 180degree)
- JX PDI-6225MG-300(20-36kg torque,never burned, 300degree) for the i2 Hand
- HK15298B (Strong torque 20kg , no noise, c, 90degree)
- HK15298 (Strong Torque 15kg, noisy, never burned, 90degree)
- MG996R (Low Torque 10kg, a bit noisy, burn sometimes, 180degree)
- MG946R (Middle Torque 12kg, a bit noisy, burn sometimes,180degree)
- MG995 (Low Torque 10kg, a bit noisy, burn very easily, 180degree)
These are servos I have tried. There is other servos that can fit the required size specifications. All these servos need to be set with a Min, Max within the software because their rotation in degree varies. Each finger of the InMoov hand has a different extension, retraction length.
Alternative Servos that maybe can fit:
For the hand:
- TGY-5521MDHV (24kg torque, should fit)
- RS-550MGC-HV (11.2kg torque, should fit)
- HS-311 (3.5kg torque, should fit)
- XQ-S4020D (21.5kg torque, should fit)
For bicep, shoulder and torso:
- JX Servo PDI-HV2060MG (60kg torque 180°fit good)
- Savöx SV-0235MG (35kg torque, fit)
- TS-80 Tower Hobbies giant scale(24kg torque, identical to HS805BB)
- CYS model S8218 (40kg torque, does not fit, needs adjustment, issue software with attach/detach)
- HK15338 (25kg torque, fit perfectly, needs resistors, reversed polarity)
- HS5805MG(27,5kg torque, should fit)
- FS6535M (33 kg torque, fit good)
- Ds5160 SSG (60 kg torque, should fit)
For the eyes:
- Towerpro SG91
- TowerPro SG92R
- JX PDI-1109MG
For stomach:
- JX Servo PDI-HV2060MG (60kg torque 180°fit good)
- Savöx SV-0235MG (35kg torque, do not fit needs modifications)
- TS-80 Tower Hobbies giant scale(24kg torque, identical to HS805BB)
- CYS model S8218 (40kg torque, does not fit, needs adjustment, issue software with attach/detach)
- HK15338 (25kg torque, fit perfectly, needs resistors, reversed polarity)
- HS5805MG(27,5kg torque, should fit)
- Ds5160 SSG (60 kg torque, should fit)