Edited by Anthony Gallot
Pir sensor is a device that detect human presence. Use a retriggered PIR.
A value is sent to arduino periodically.
Useful to wake up the robot or launch face detection/recognition. Or what ever you want.
Summary :
- ELECTRONIC
- SETUP
- UTILISATION
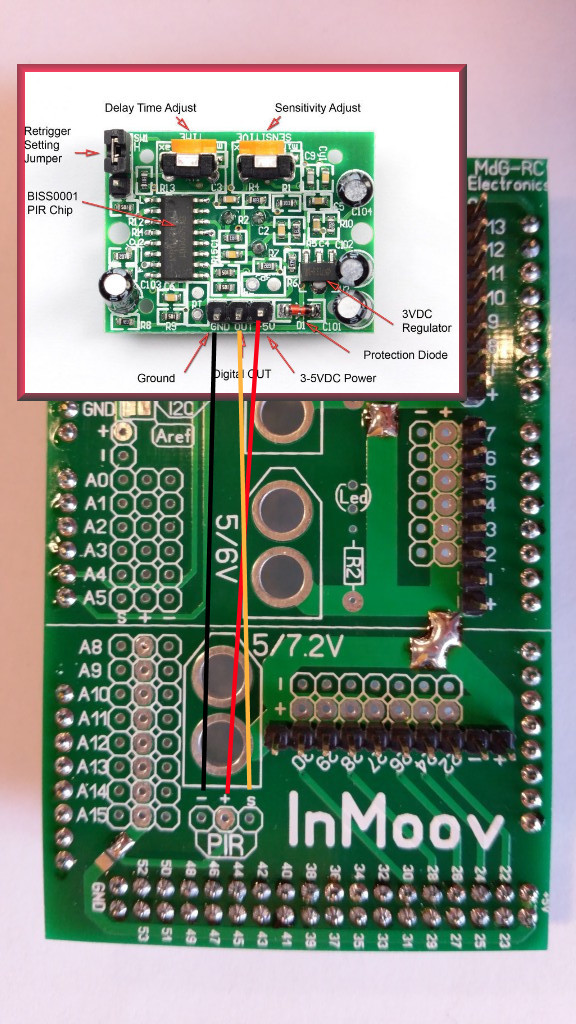
ELECTRONIC
SETUP
Open InMoov/config/C_pir.config and setup like this :
[MAIN]
isPirActivated=1
;whitch arduino control pir :
PirControlerArduino=right
[TWEAK]
;5 minutes after presence detected
HumanPresenceTimeout=300000
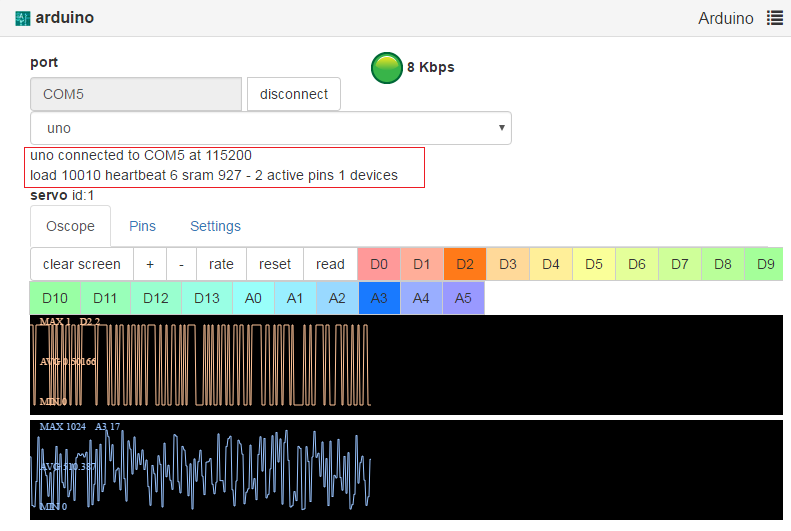
To check if the PIR is worky, you can use a multimeter between gnd and signal pins or use input oscope from webgui too.
MRL oscope view:
UTILISATION
By default the pir pin is 23 on the i01.left Arduino. By default « sleeping » function is sent after 5 minutes of human inactivity.
If the robot is sleeping and if human is detected, « wakeup » function is sent.
File InMoov/services/C_pir.py