Salut Gael
desolé pour la réponse tardive
ton no worky montre que tout ce passe bien avec ton script jusqu’a ce que tu tente de bouger un servo, le signal est envoyé, mais l’arduino cesse de répondre.
Donc ton script est correct, mais je suspecte que ton hardware est mal connecté puisque l’arduino cesse de fonctionner. L’erreur la plus commune est d’alimenté les servos a partir de la carte arduino. L’Arduino n’est pas capable d’alimenter correctement les servo (peut-etre un petit, mais sans plus).
Tu dois utiliser une batterie (ou une autre source suffisante d’électricité). Un servo comme un HS805 peut prendre plus de 2A (l’arduino peut fournir au maximum 0.2A).
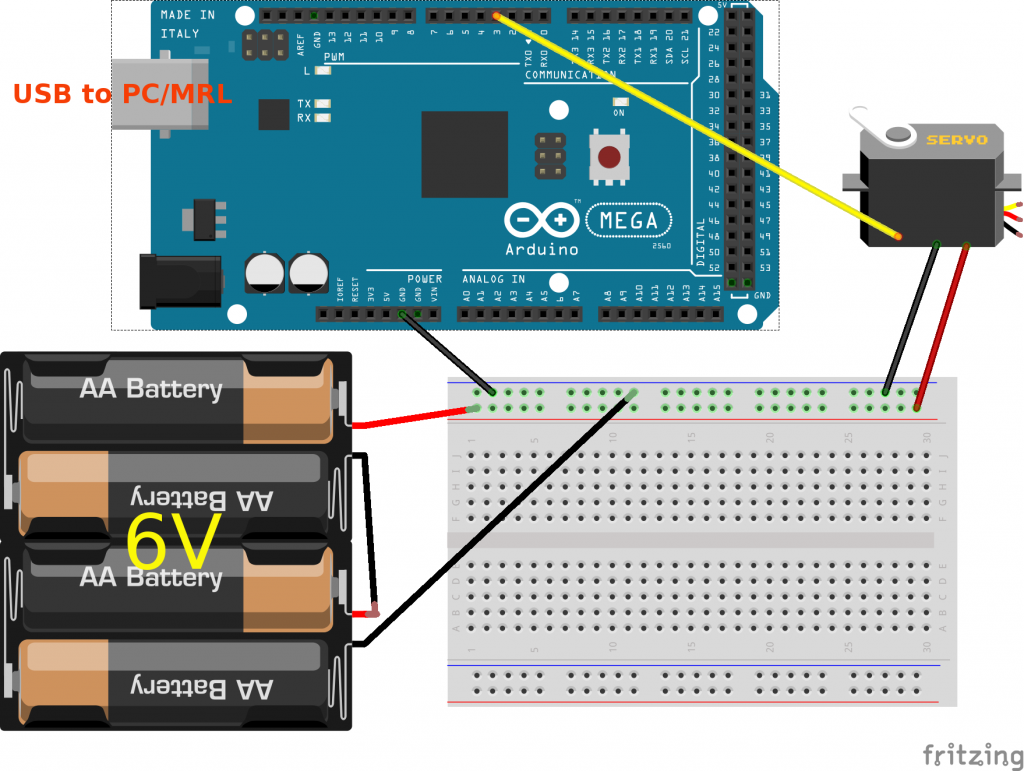
La bonne facon de connecter tes servos a l’arduino est la suivante
Le fil S (jaune ou orange) sur une pin de l’arduino
Le fil + (rouge) sur la polarité + de la source de courrant
le fil – (marron ou noir) sur la polarité – de la source de courrant
tu dois aussi connecté une fiche ground de l’arduino a la polarité négative de ta source de courrant pour assurer le meme référentiel.
-
Cette réponse a été modifiée le il y a 9 années et 4 mois par
 Christian.
Christian.