Shoulder Assembly

Thanks to Shido Xen for this layout sheet.
.jpg)
Shoulder. Thanks to Anar for this colored sketchup (http://www.reppersdelight.spacymen.com)
.jpg)
Shoulder exploded. Thanks to Anar for this colored sketchup (http://www.reppersdelight.spacymen.com)
Torso Assembly
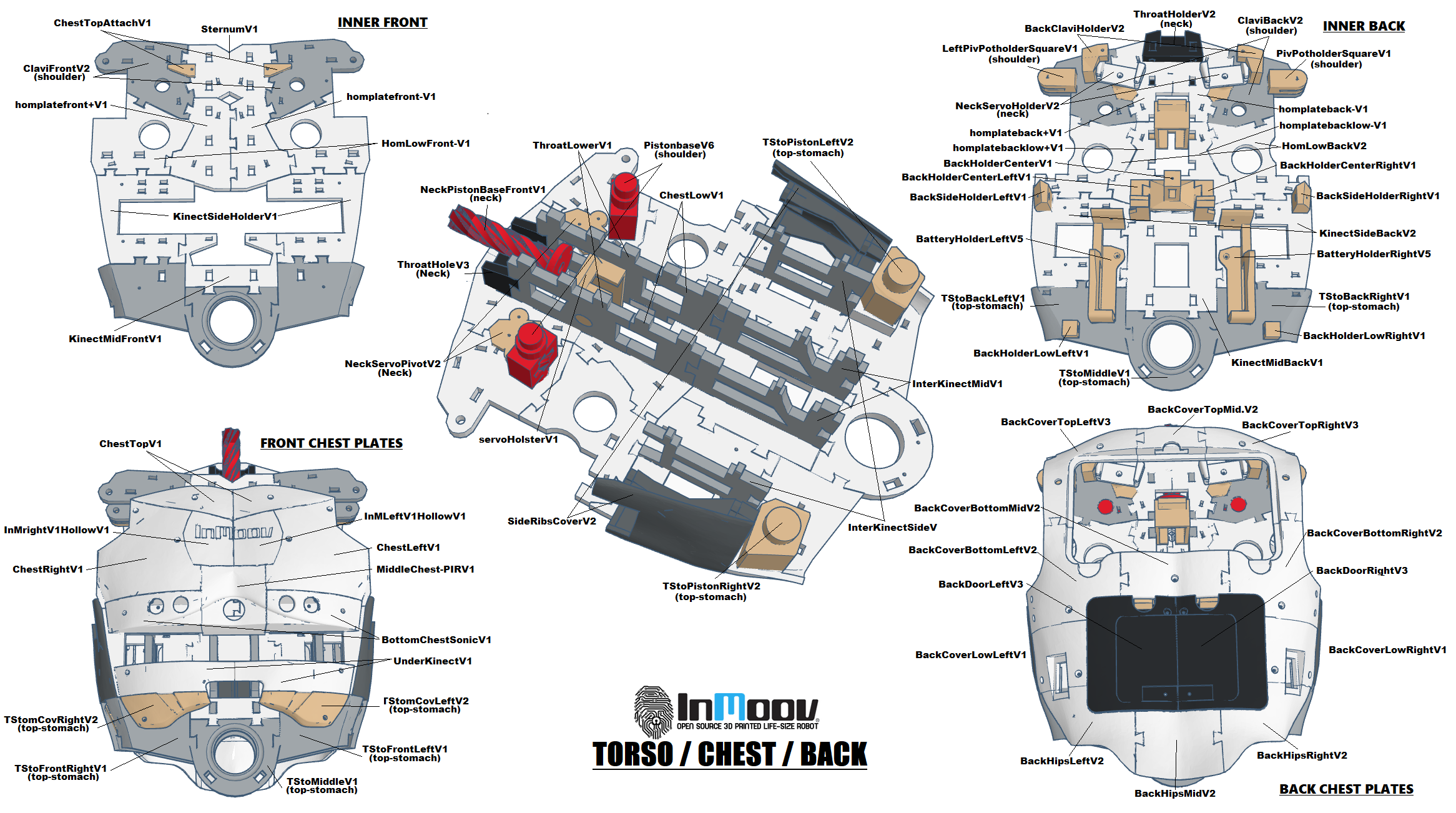
Thanks to Shido Xen for this layout sheet.
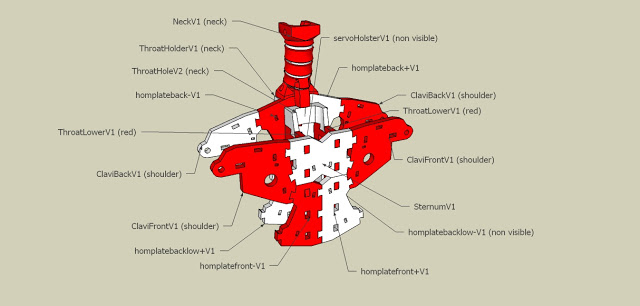
Torso. Thanks to Anar for this colored sketchup (http://www.reppersdelight.spacymen.com)
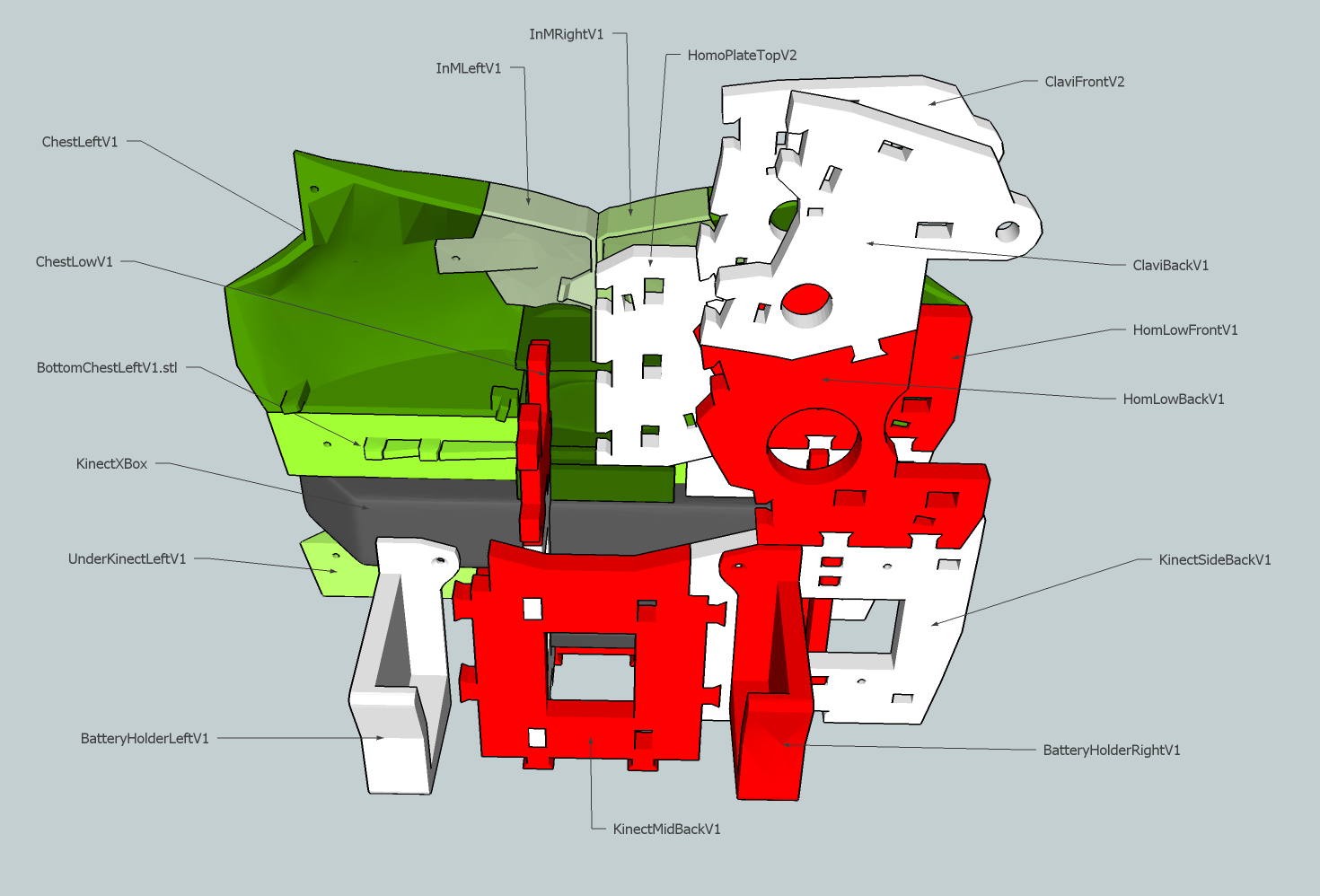
.jpg) Torso Back. Thanks to Anar for this colored sketchup (http://www.reppersdelight.spacymen.com)
Torso Back. Thanks to Anar for this colored sketchup (http://www.reppersdelight.spacymen.com)
Torso side view by Gael
Torso back side view by Gael
Torso+Chest back view by Gael
Chest Assembly
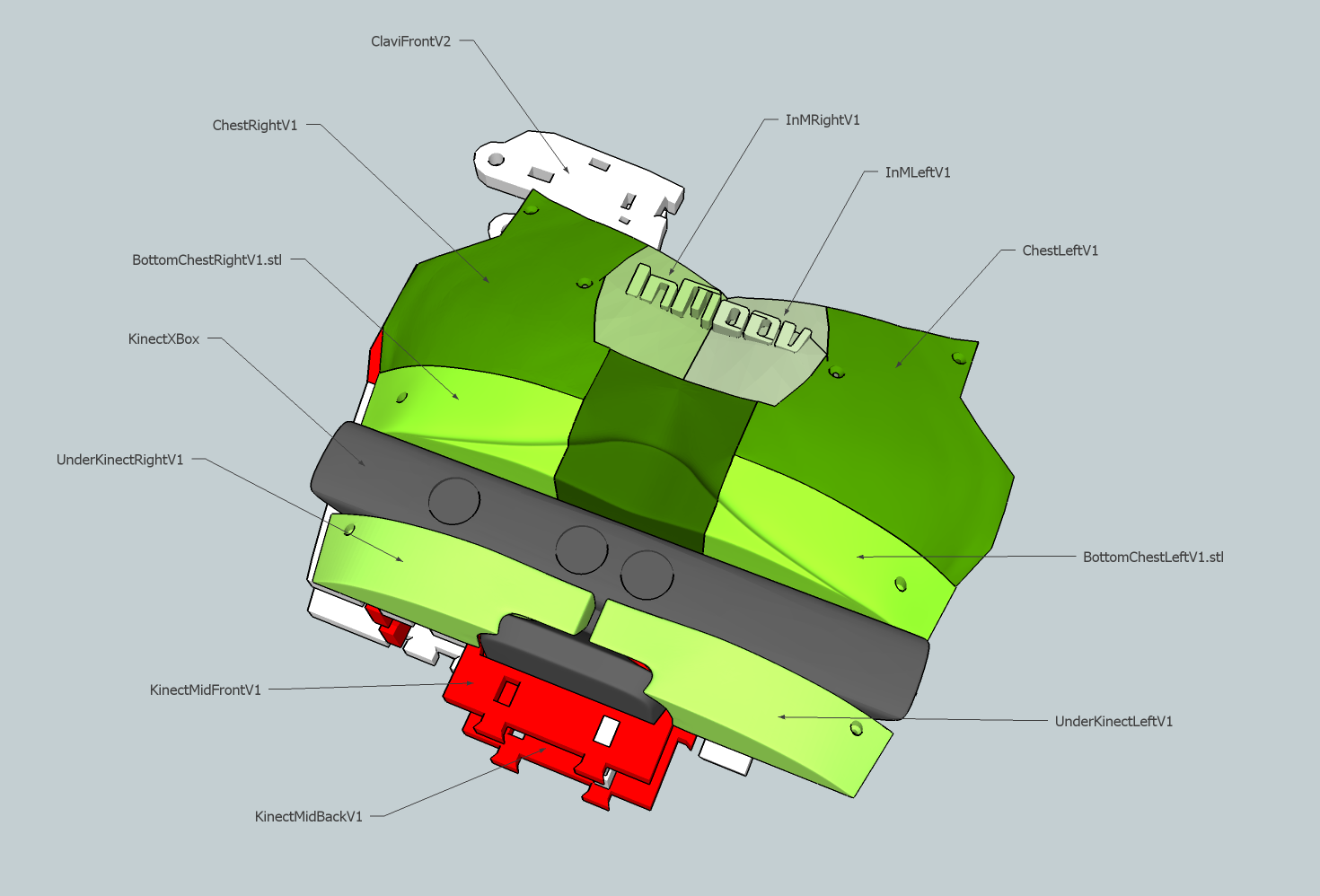 Torso+Chest front by Gael
Torso+Chest front by Gael
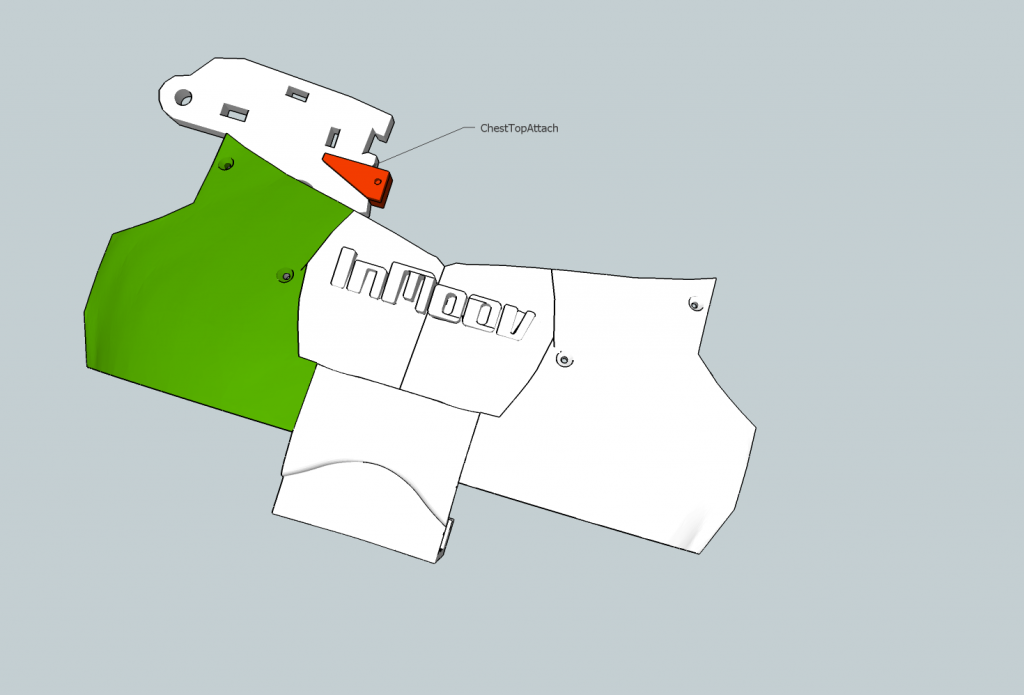 Torso+Chest+ ChestTopAttach by Gael
Torso+Chest+ ChestTopAttach by Gael