ta carte Arduino est alimenté par le cable USB de ton ordinateur, c’est amplement suffisant pour elle
Les servos ont un besoin différent, un ampérage beaucoup plus grand. La pin 5v de l’arduino n’est pas assez puissante pour fournir ce courrant. Tu as donc besoin d’un autre circuit électrice qui sera utilisé pour le mouvement de tes servos
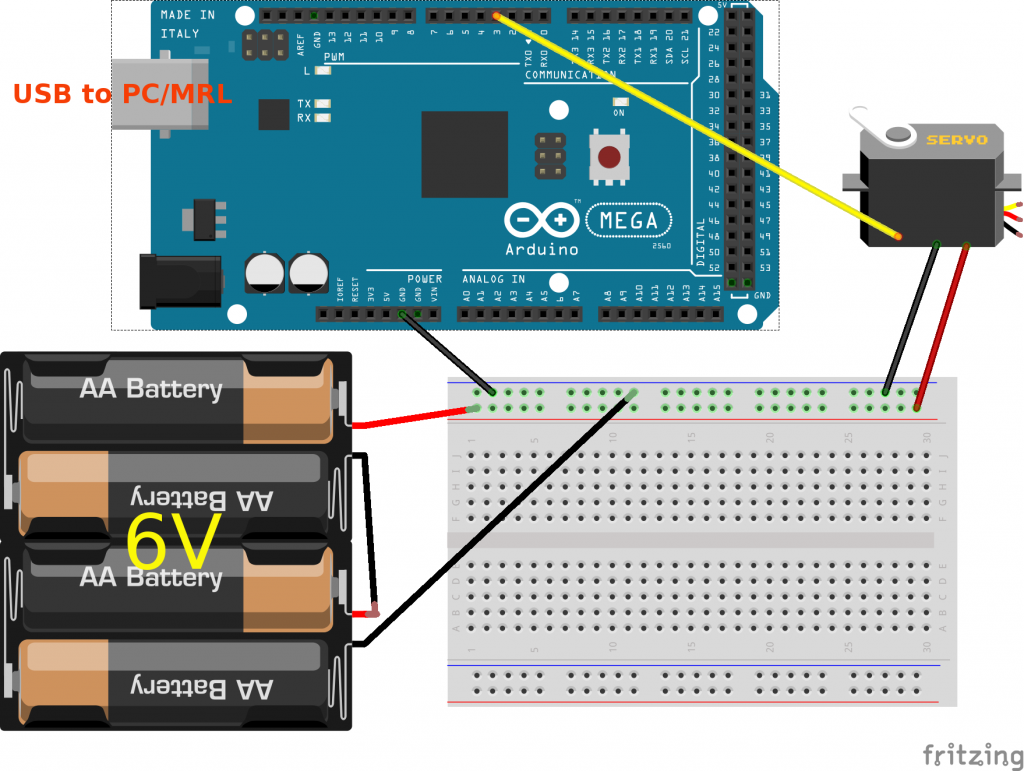
sur le schémas que j’ai mis, on utilise un breadboard pour répartir le courrant. La borne positive de la batterie est connecté sur le rail rouge ainsi que le fil v+ de ton servo (habituellement le fil rouge).
la borne négative de la batterie est relier au rail noir ainsi que le fil – du servo (habituellement noir ou brun)
Le signal provient de l’arduino, on connecte donc le fil S (jaune ou orange) du servo sur la pin que l’on veux sur l’arduino. Mais comme le courrant de la pin arduino provient d’un autre circuit électrique (le cable USB connecté a ton PC) il faut s’assurer que les deux circuit ait le meme référentiel. Pour cette raison, on relie les mise a terre (ground) de l’arduino a la borne négative de la batterie (sur le rail noir du breadboard).