Building progress of the left hand. The main reason I’m building the left hand is because I sold away the right hand to DesktopFab. (I won’t sell again, too much work, not enough time) And now, if I want to keep on fooling around with a robot, I have to rebuild the whole thing. It means, I will have to make another right hand. This also means it will be the fourth hand I will have printed and assembled. Gee, I could have made a octopus instead.
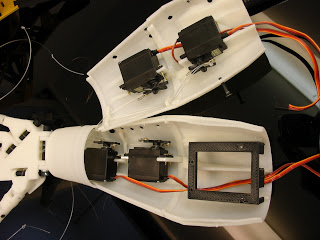
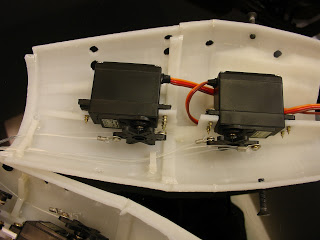
Left hand set up. Check well the position of the servos in their brackets.
 |
| Also look at the positions of the cable holders. |
Use the side holes for to tight fit the servos. Notice the arduino support is set upside down in the left hand, this is for the USB connection and to adapt to the hinge/shaft of the elbow.