I have modified quite a few things on the hand, and so I had to print it all over again with a new forarm. What is very different, is the lining which is much, much more easy than before.
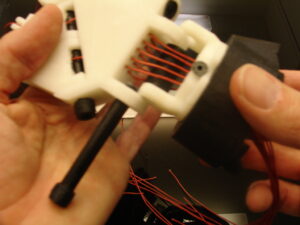
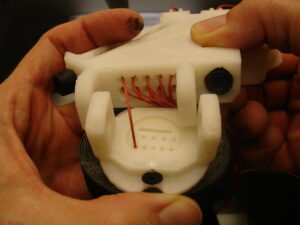

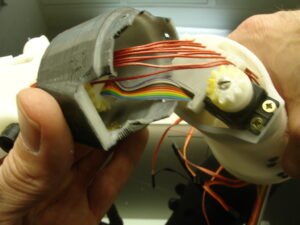
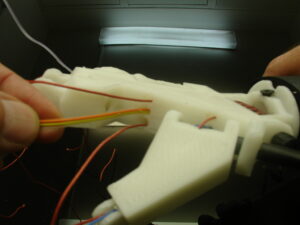
By the way, I created a new tuto with pictures of the forarm and hand assembly. You can find it in tab Assembly/Assembly Help/ Hand and Forarm.
Now the lining and the electrical cables don’t get mixed up and they are very easy to identify all the way through the assembly.
To finalize this, there is now the finger sensors you can download in the Library or CubeHero.


I still need to finish the sensors fingers tuto.