I have uploaded on Thingiverse « robcap3V1 » and « leftrobcap3V1 » for to close the elbow of the forarm. This part is necessary if you plan to go on with the project of the complete arm. It also gives a finishing touch to the forarm…
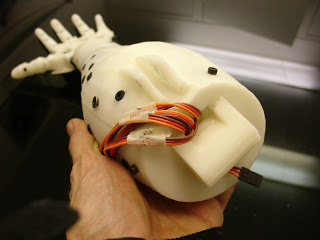 |
| Here you see it attached to the forarm, with the « elbowshaft1 » glued on it. |
 |
| It needs to be glued to « robpart5V2 » or « leftrobpart5V2 » depending on which arm you built. |
|
|
|
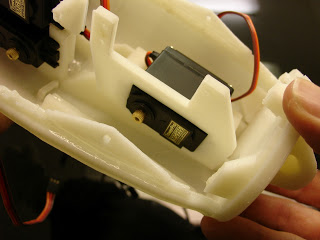
I also changed « bolt » to « bolt_entretoise », because every body doesn’t have aluminium pipes in his workshop to make some entretoise/spacer.
 |
| Here you see where they are meant to be used. |