InMoov is invited and will be presented for the 3D Print Show in London and Paris.
London 7-9 november, Business Design Center
Paris 15-16 november, Carrousel du Louvres.
I do keep myself busy lately… A bit too much in fact.
Make is organising a big robot hack and InMoov is involved. There should be a bunch of hangout sessions. This is going to be fun!! Chuck Fletcher, who presented his robot InMoov to the New York MakerFaire is going to be part of the sessions as well.
Here is the link to the article.

I was also invited by Adafruit for the last Hangout on Make the World Prosthetic. I couldn’t watch it again entirely. Feels terrible. I feel like I missed many of the important points I had in mind. Talking to medias is something, and I better practice.
At the end of the hangout, Adafruit asked: so what do you need for to keep on working on your project? and what do I answer: an Arduino script instead of « I need sponsors ».
But I was thinking at the moment, who doesn’t need sponsors…I can’t decently say that.
I particularly liked Matt Griffin‘s question, which I didn’t understand at the moment (language barrier), about a comment posted by someone on my blog. And I would like to answer now.
The comment was: We are all going to die.
To which I responded: Unfortunatly yes, it has always been that way on our planet Earth.
My answer wasn’t at all pessimist for the human race, I was only kidding the poster by pointing that, yes we all die one day, it is in our nature, and it is not because of robots.
I was planning to show more of the new prosthetic hand design I have been working on, but it was so dark on the camera, that we couldn’t see anything of it. In fact at the last minute I added the neon light at the feet of the robot, which gives that spooky ambiance.
My goal was also to talk about Bionico, and Brancante and … Just not enough time. Two important prosthetic projects using InMoov…
I’m a Maker not a Talker.
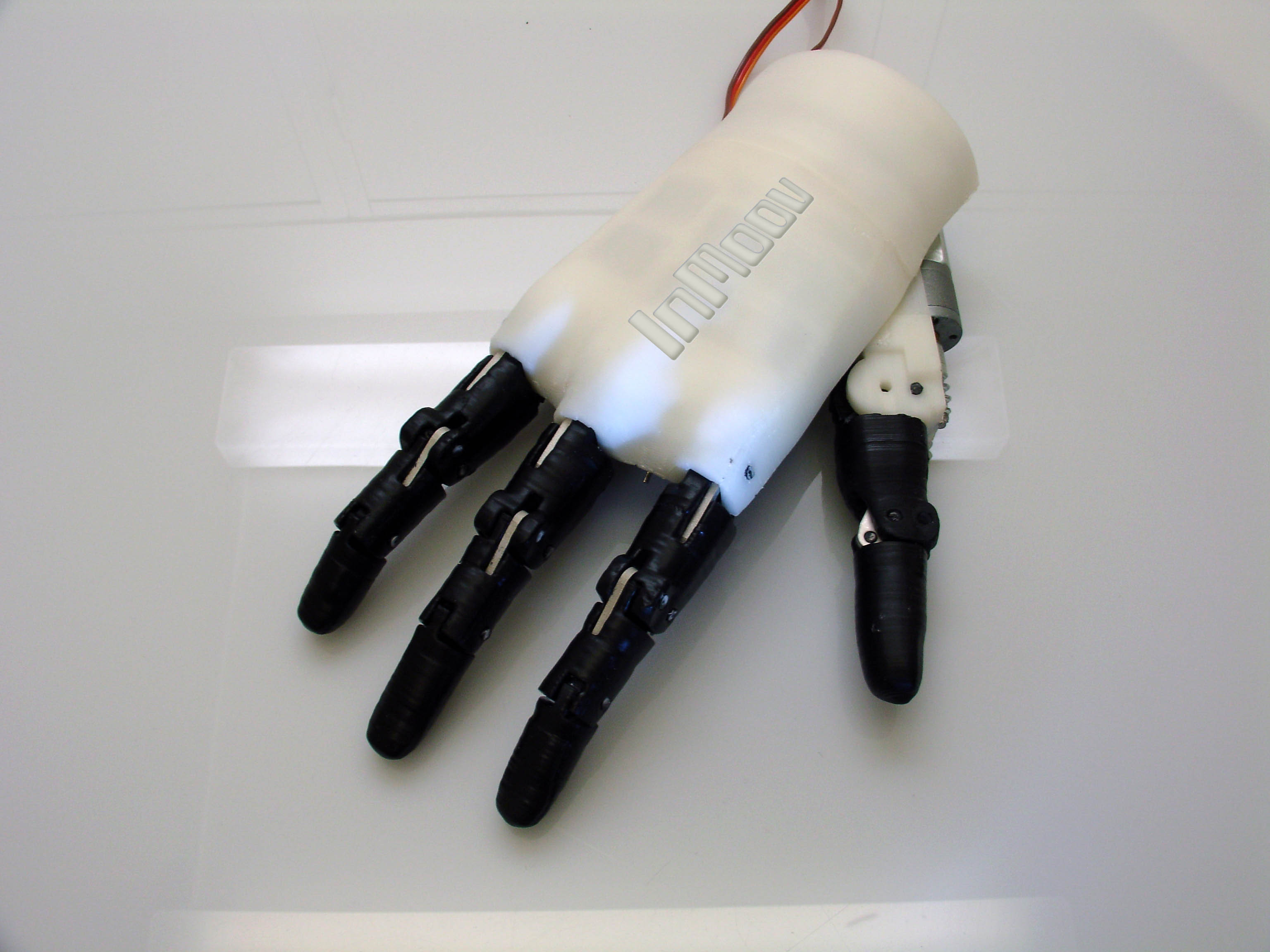
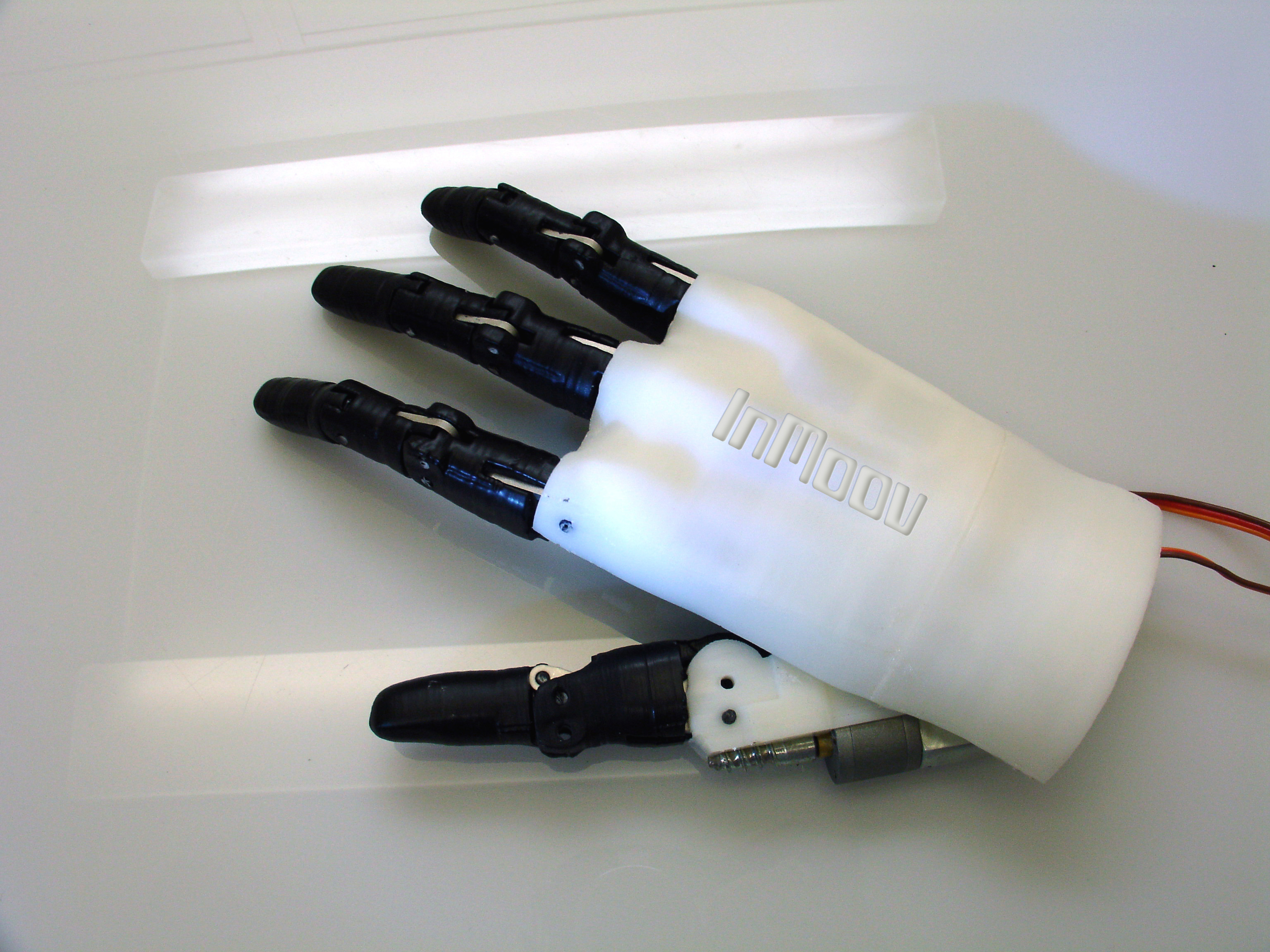
Anyway, so this is going to be something incredible, the finger mecanism works very nice and I finally found a way to set the second thumb actuation motor in a way that it won’t stick out of the hand. It does make a bump in the palm, but compared to all the other 3D printed prosthetics hands I have seen, it’s nothing. Mostly what I’m proud of is the compact design, not bigger than a real hand, totally mecanised, (no wires) and when I release it, I hope good talkers will train me!!
In fact if you already have technics on how I should proceed for to become a trained speaker, feel free to post a comment. 🙂
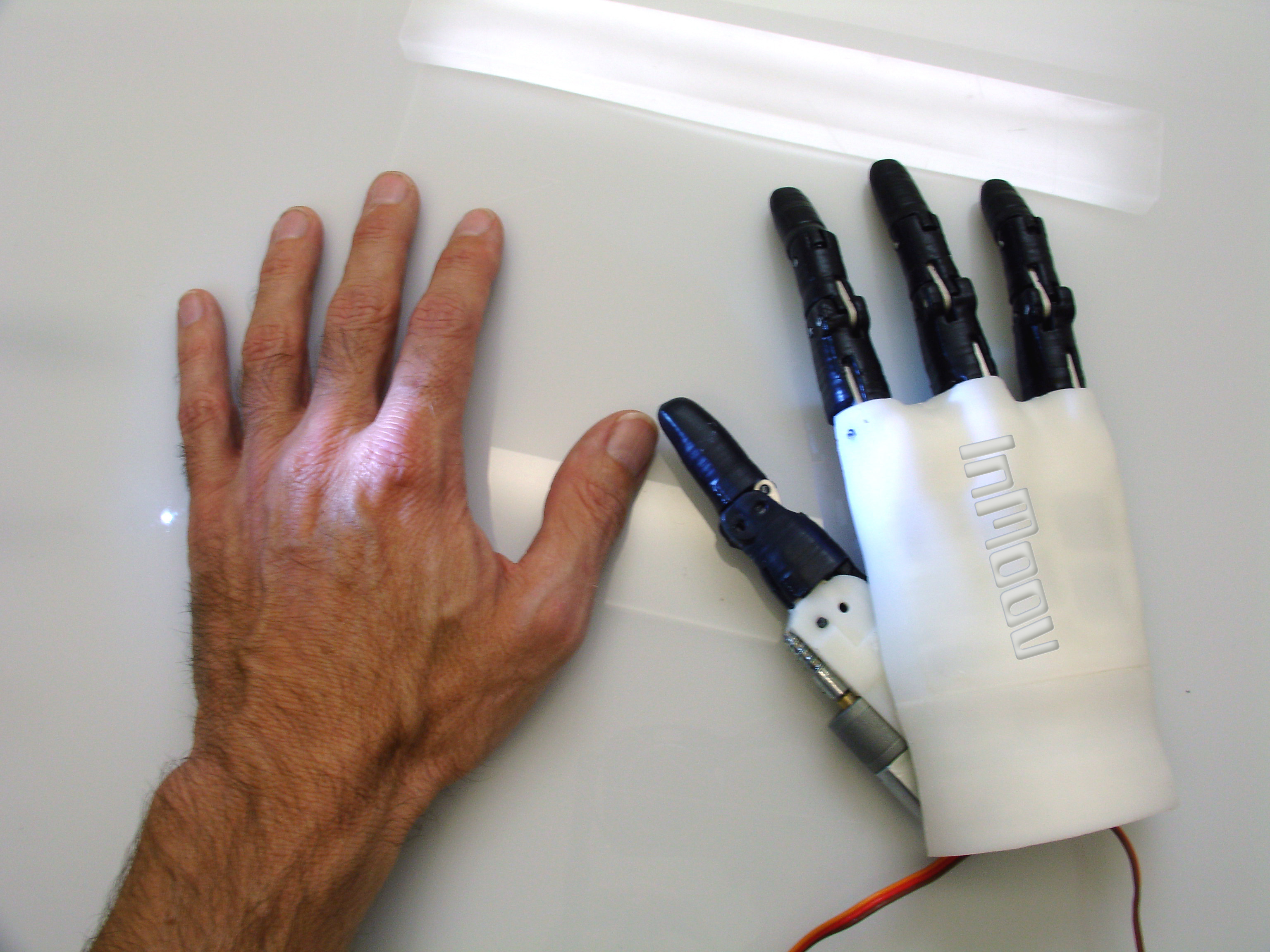
On the pictures you can see the motor for the thumb, this is not the last design. I haven’t printed the last design yet, but it gives you an idea of the proportions compared to my hand. The wrist point needs to be reduced in diameter, it is now the size of a human wrist, but it should end up more round to fit the arm socket.

The assembly is pretty straight forward, I have printed this complete hand in a day and assembled it during the same day. I know the inside of the hand is not printed yet, but lets say it will be a matter of two days to print and assemble.
I have made basic weight test on the fingers, without actuating the motor, just to see how strong and rigid is the whole finger, and I’m happily surprised. the finger could support 8 kilos without breaking, I didn’t go further though.
Next is to finish the thumb casing and find out what is the most common attach system to a arm socket. The battery casing is also something I need to think of. Any ideas are welcome for the battery pack.
I’m planning on scanning the arm of the my beta testing girl, and try to print a soft socket with the shape of her arm. During the Adafruit hangout there was picture shown of a robohand socket using a sort of bee structure. I really think that could be a nice way to approach the socket structure, soft and aerated structure.
Don’t know if you guys saw this video but, I got in contact with Mr Shim and Mr Seokju (Unmanned System Research Group (USRG) & Field Robotics Center (C-FRIEND))and they gave me the script for to get this to work with my Leap Motion. They are also printing the whole robot in South Korea! Unfortunatly it is not that simple yet, because I don’t have a a recent computer with UBUNTU. My laptop, Lenovo U410 with i7 intel processor, doesn’t seem to want UBUNTU or Other Linux distrib to be installed. There is a BIG bug to access the bios, which I never discovered before, but after searching on the net, I found out I would need to flash the BIOS. No thank you. I played a lot with computers, found many in the streets and reassembled them from scratch, it’s like playing with Lego, but flashing the BIOS can be trouble.
So for now I’m a bit stucked with testing my Leap Motion with the InMoov Hand.
But have a look at their video and see what can be done, this is fun, no?