Okay, as I said before to go to Roma, parts for the rest of the Torso are ready for download.
This includes the surroundings of the kinect and it’s casing.
You will need a whole bunch of parts which are added to the torso CubeHero downloads.
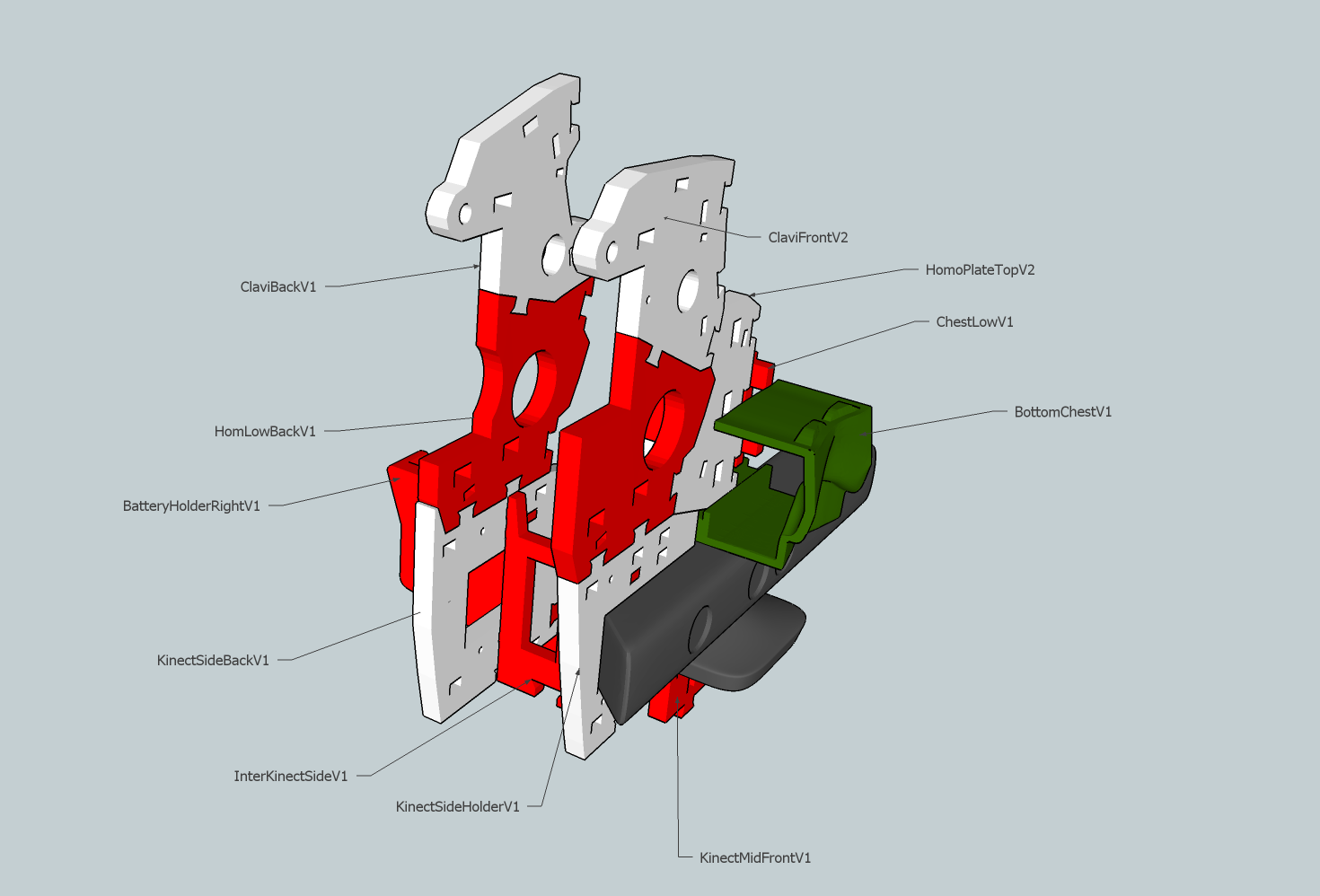
Here is the list of added parts and the number of prints needed:
2x: KinectSideHolderV1.stl
2x: KinectSideBackV1.stl
1x: KinectMidFrontV1.stl
1x: KinectMidBackV1.stl
1x: KinectBottomHolderV1.stl
2x: InterKinectSideV1.stl
2x: InterKinectMidV1.stl
2x: HomLowFront-V1.stl
2x: HomLowBack-V1.stl
2x: ChestLowV1.stl
You can find sketchs with parts labeled and also 3D PDF Sketchs in the « Assembly » tab.
As you will see ClaviFrontV2 has a extra attachment which ClaviFrontV1 didn’t have, but if you have the V1 version already printed it’s okay as well,. No need to reprint.
You will find a battery holder which can be placed at the rear of the robot. This holder suits the batteries 6V12AH , I am using, but I’m sure many of you don’t use the same, so I guess you wil have to adapt something for your needs.
The Kinect used here is a model XBox360.
Get your printer even warmer!!
I have also uploaded all the parts for to build the Chest on Cubehero
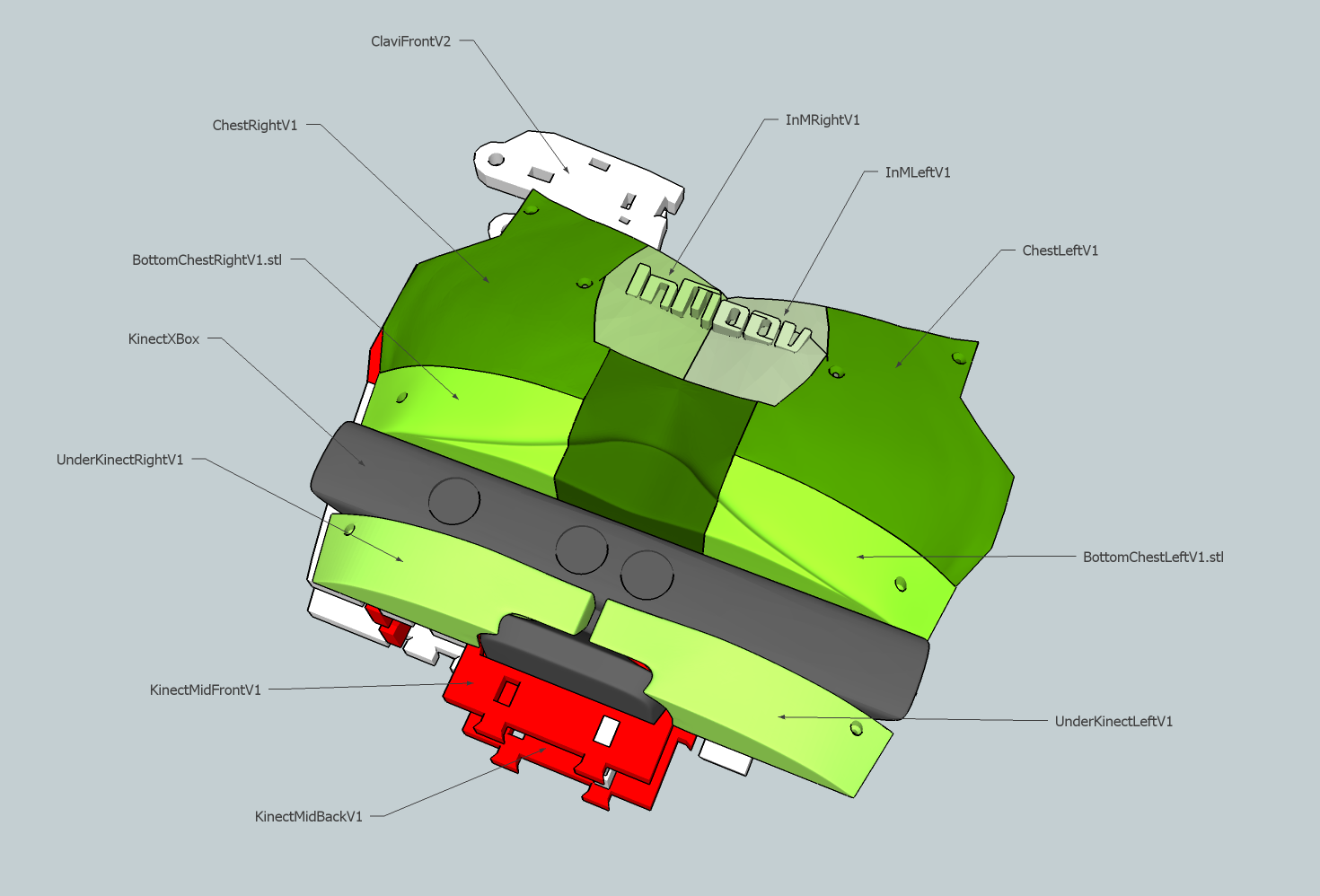
Here are the parts needed:
1x: UnderKinectV1.stl
1x: MiddleChestV1.stl
1x: InMrightV1.stl
1x: InMLeftV1.stl
1x: ChestTopV1.stl
1x: ChestTopAttachV1.stl
1x: ChestRightV1.stl
1x: ChestLeftV1.stl
1x: BottomChestV1.stl
Myrobotlab is under reconstruction at the moment, not the site, but the InMoov service. Grog is under full pressure:)
The point is to get things cleared up in the service. What happens is that I keep adding features request to Grog, like the Kinect with point cloud, or face tracking script by Alessandro. All those new stuff get added over each other and if organization is not done from time to time, it gets like my worktable at it’s worst moments. Well it is like that since a while…

if you need to run your robot or just the hand, the version 1695 should let you use the Scripts (inmoovfull.py and minimal.py) we use to have on the InMoov page service of MyRoBotLab.
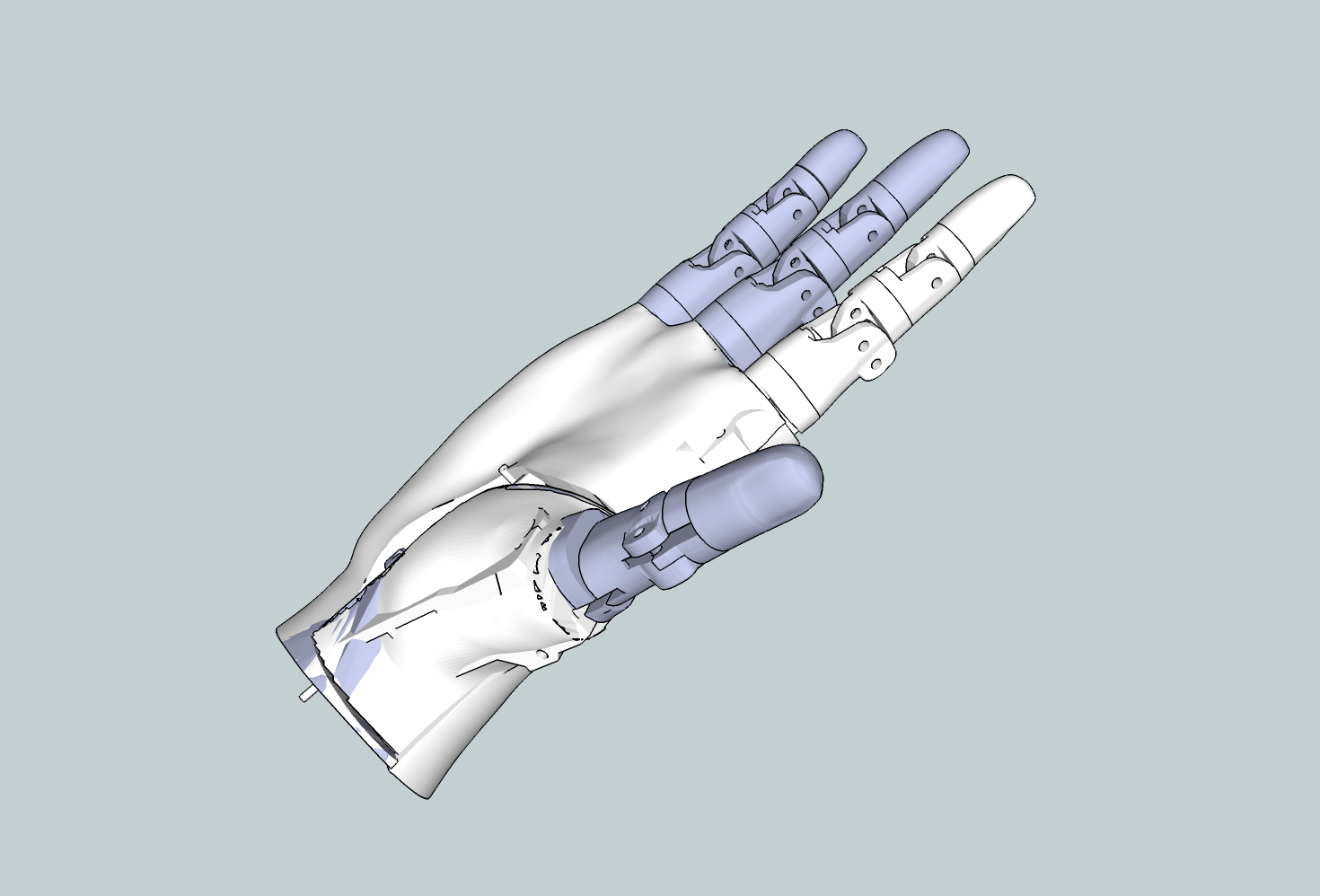
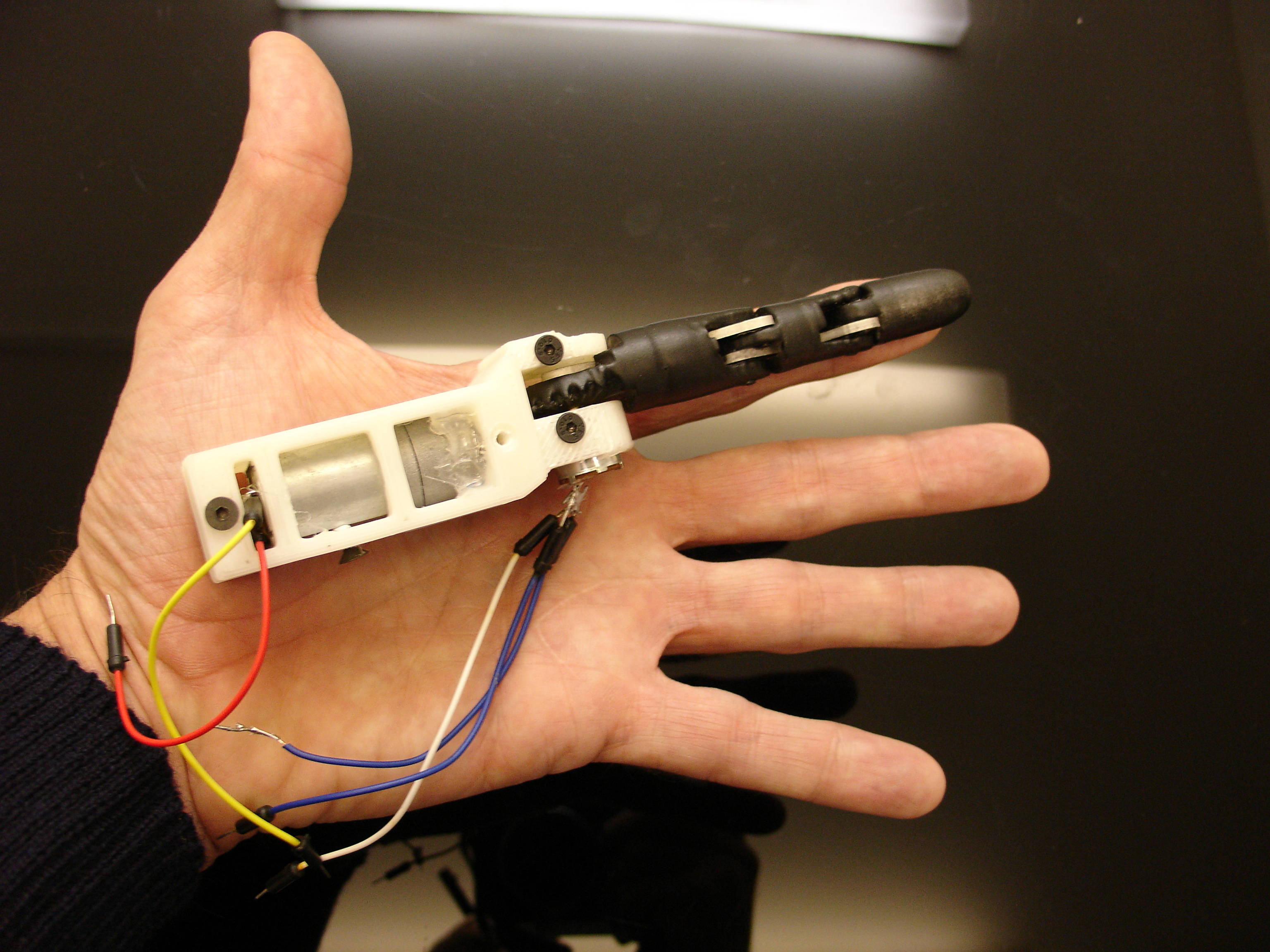
Working still some more on the new fingers for InMoov hand and prosthetic. I modified my designed in order to get easy 3D printed bevel gears instead of using a wormgear. I also added a potentiometer in order to get feedback position for each finger.
A builder which is following closely the evolution of this hand has sent me some of my Actuators water jut cut out in metal. Of course we can print these actuators in ABS or PET but having them done in metal adds strength over time giving a sturdy feeling.
Here the ABS has been put in pur Acetone for about 20 to 30 seconds and then sprayed Black Mate finish.
The pins are also done with ABS, though, for to make an everyday use prosthetic it would be better to create the pins with piano cord or stainless steal cord.


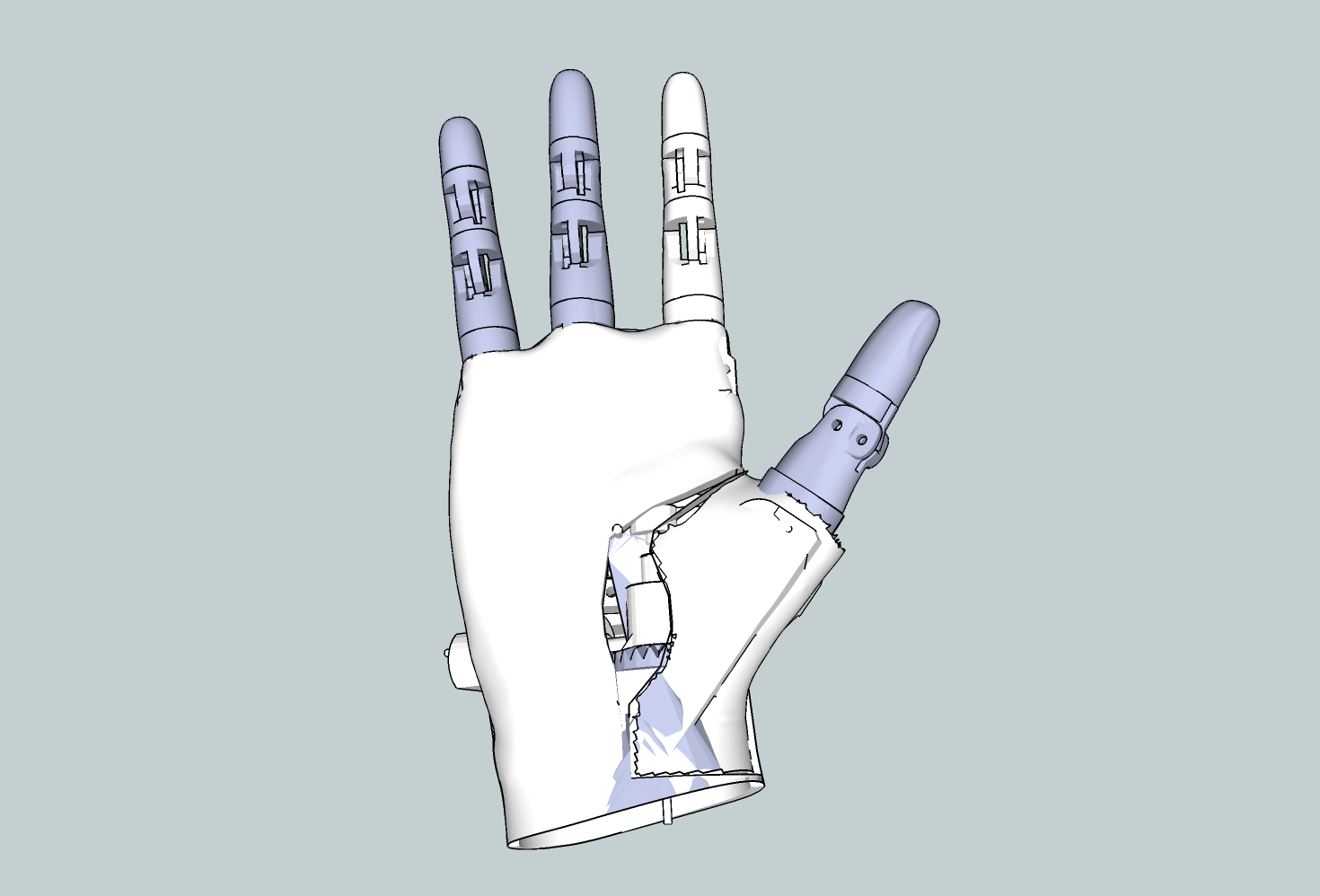
I deliberatly removed a finger! Pinky is gone!
The main reason is that if I want this hand to be used as a prosthetic it should be able to fit woman’s size hands. I know there is also children but at the moment I’m studying adult size hands, just wish I had more time.
Two weeks ago there is a young woman that came to my workshop, she had heard about my project through family members. She is missing, since she was born, a hand and forarm. At first when I heard her case, I thought maybe we could just use one of my robot hand and forarm, but when I saw her I understood it was not possible. The size.
My robot hand was obviously too big for her. There was no way I could just go on with my original design posted in July. Fitting 6 motors in the hand would always make it too big.
So I made the choice to remove a finger. This helps for the size and also benefits the weight, although, I’m not really worried about that since all the parts are plastic and the motors aren’t heavy.
Working on the thumb actuation is a challenge because it involves a double actuation in a minimal space. I plan to use five motors in total, all the same for simplicity of built. But those motors are a bit long (4.5 cm) I choosed these because they aren’t expensive (19 euros) and the planetary gears give an output torque of 8.4kg. But in my set up, for the thumb first actuation, I need to have the motor in a transverse position to the palm. This doesn’t make me happy at the moment.
I can’t make use of the wrist space because Nicolas from Bionico, has his arm until the wrist. Any centimeter added to a arm makes the person look strange.
I’m keeping on working the concept in this direction, though. No better solution for now.
Adafruit has launched an interesting Google hangout about Making Prosthetics, I was not even aware about it since I was at the Makerfaire in Roma. I’m not much of a Talker, more a Maker, like a bear in its cave.
I’m considering getting involved in this hangout, but if I make a time balance, I think it would help more people if I would keep working on my design instead of getting involved for to talk, but in another hand I wouldn’t get heard Out There.
Talking can become necessary at some point if you want to be heard in the Open Source world.
I would like to get sponsors to help me going further, because beside spending a lot of time (nights) I also spend a lot of money doing these researches.
I could have made a Kickstarter campaign to get money for my designs since the beginning of InMoov project, but it is NOT how I consider a project being Open Source.
Or am I wrong?
I sure face a dilemna, being Open Source sharing for free, in a world ruled by money. How can this be solved, the path will be long, before we find a way.
Sponsors, the word is out!