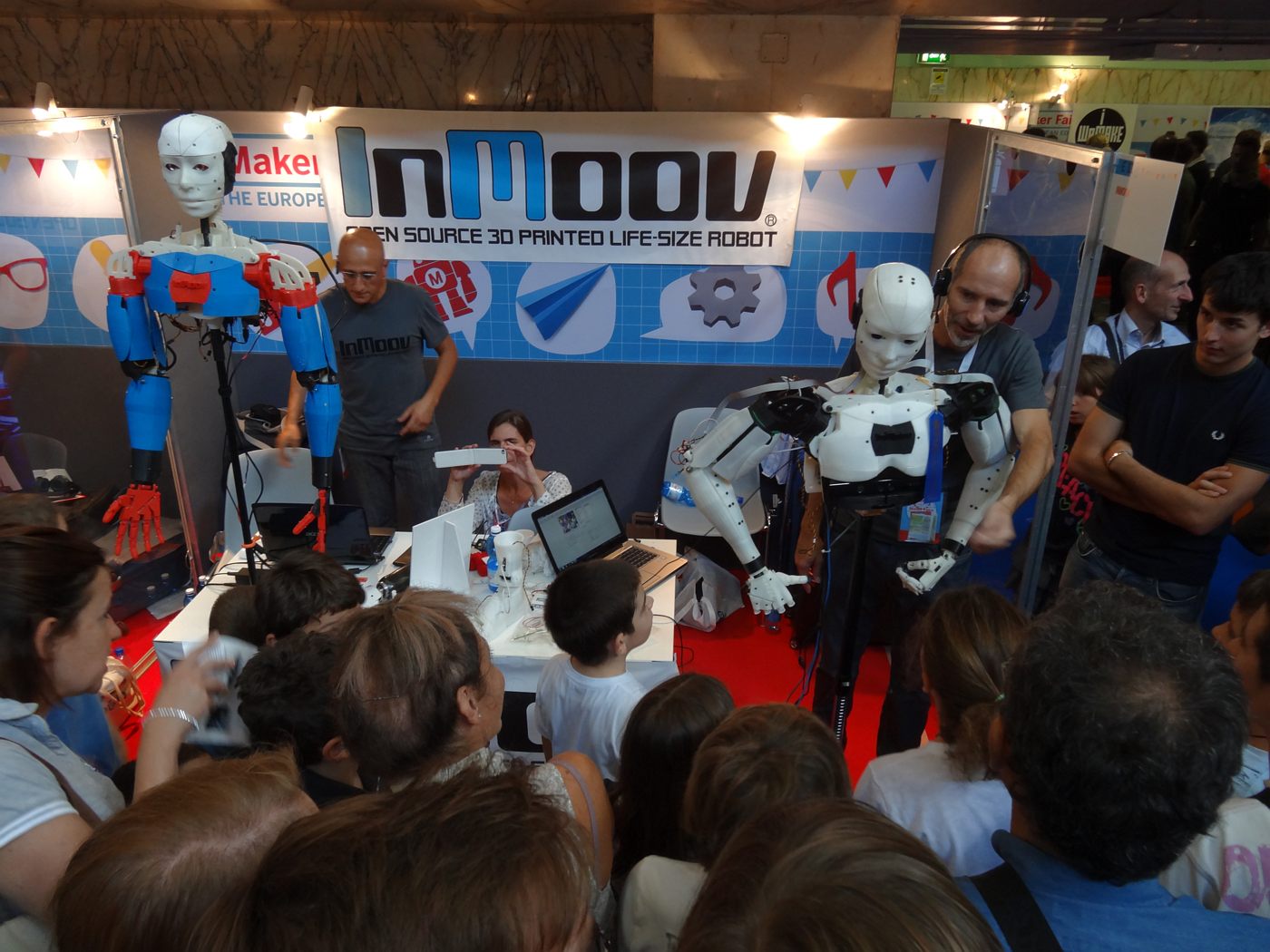
Four days of geekiness with Makers from all over Europe!
It all went very smooth, no problems with the flights and InMoov arrived safely. No broken jaw or shoulder.
It was pretty intensive, but what a great time.
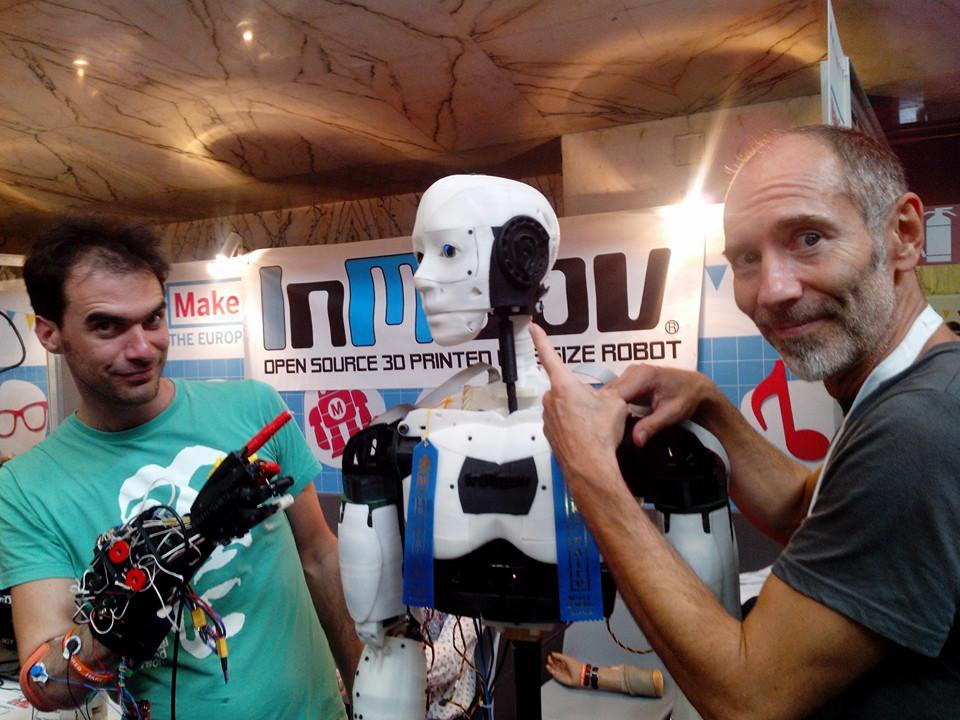
I meet Leonardo (who’s made this website) and Alessandro (Ambassador of MyRobotLab), and we shared some unforgetable moments.
We were very proud, the robot got two Ribbons of Merit, one from Raï Uno (the main Italian TV channel) and the other from the Arduino Team.
Leonardo did a full interview with Raï Uno TV and will be very popular, I think. 🙂


My wife and I. I’m sure glad we were together for this event, I couldn’t have done it alone.
I think I would have died of thirst.

Alessandro and his 4 PID controlled face tracking implemented in MyRobotLab.


The robot of Leonardo, being cool for the picture!

One of the things that really impressed the crowd was the vision tracking, it is interesting to see how the people try to interact with the robot when they realize the robot is looking and following them.

R2D2 meets InMoov, it was a very good moment.


Alessandro is getting in touch with InMoov with voice control and vision tracking.

Nicolas with his printed InMoov prosthetic hand baptised « Bionico », the next iteration will be much, much smaller because I worked on getting the motors directly in the palm of the hand instead of behing on the forarm. The fingers won’t be actuated anymore with cables (see previous post)
I have to say that the robot of Leonardo has been working for almost 4 days continuously. He had two minor breakage, and this happened because one of the potentiometer became loose causing the bicep to go beyond its maximum position.
Fortunatly, behing in a Makerfaire, there is 3d printers at every corner. Wasp 3D printers kindly printed a bunch of parts for us just in case and in different materials, ABS, PLA, PET. They have a technique to print ABS with oil, and apparently it would fantastic for all the friction parts of InMoov.
Leonardo had a power supply which would let him run the robot at all time. I was running on batteries, and at the airport in France, I had to remove one extra battery of my luggage because of exceeding weight. So my robot, at the end of the day, could run for a few minutes and had to be recharged again…
I had my two last MG995 burned and replaced them with two new MG996R, I had taken by security.
Two fingers of my robot got broken by kids who tried stuff you wouldn’t want to happen to you. Acetone got them repaired in a minute, once back in my workshop.



Interview by Tom’s Hardware during servo swapping:
Found some videos on the net about InMoov:
Check out at 8:50 it is the 4 PID control of the InMoov’s eyes done by Alessandro, Ambassador of MyRobotLab:
Check out at 0:15 a very, very short footage of InMoov movement followed by Massimo Banzi interview: