Well, I got bad news for those who bought the HK15298 servos for the forarms. It seems these digital servos have a restricted rotation from 0 to 90° which doesn’t let the fingers do their complet movement.
There is search going on at the moment to see if we could reprogram them to get a rotation of 0 to 145°, but it won’t be an easy thing, I think.
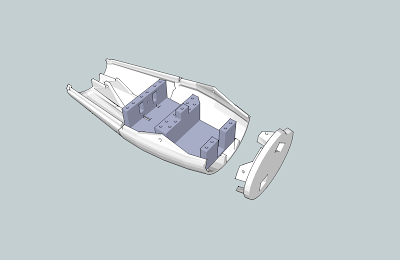
This has lead me to design another bracket system.
As it was in my previous version the servos were set sideways, and we could have a total of 5 servos.
The space between the bottom actuator and the robpart was really small
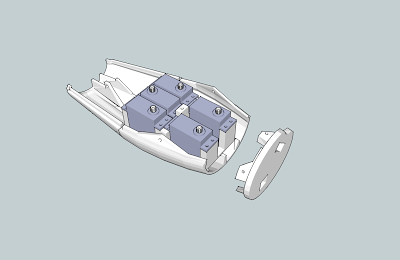
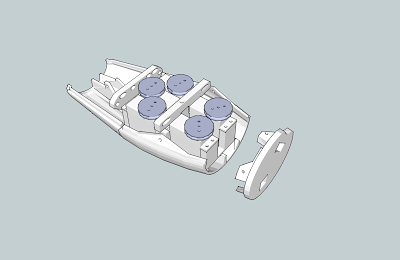
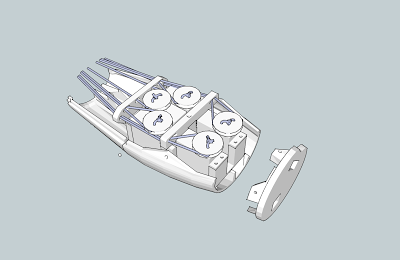
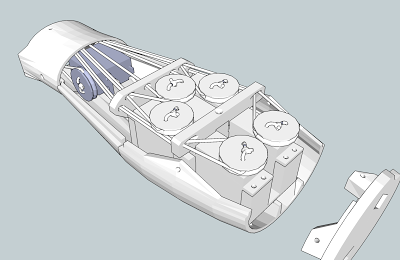
I wanted to create some printed actuator rings with a bigger diameter which would allow restricted servo rotation to get more pulling developpement. So I turned all the servos up, this way I get more space and actually it all comes out more fonctionnal. I remember when I first designed the forarm brackets, how much time it took me to create it. It was insane.
This went actually pretty fast.
I have uploaded it on Thingiverse.
You can get here.
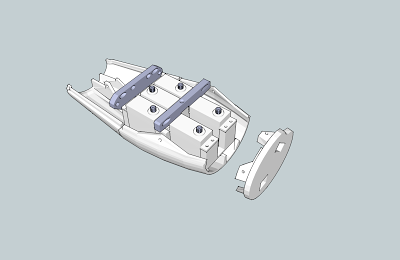
You don’t need to reprint the « robparts », it can just fit in. You only need to remove two little parts with a plier and it all should go nicely. Fixing the fishing braid will be an easy task, done with a few nots.
The nice thing about this, is that we can have an extra servo in the forarm now. That’s a total of 6 servos. With a bit of redesign we could even have 7 servos in there.
We can actuate the thumb with this derivative or create something to move up and down the wrist.
I haven’ t tried to print it yet, since I don’t need it, but I think it should be fine.
The assembly is pretty straight forward.
Have fun!